Biography
I am an incoming Ph.D. student at Westlake University, where I will join the
Spatial Intelligence and Robotics Lab
under the supervision of Prof. Peidong Liu.
My previous research focused on event-based 3D perception, reconstruction, and SLAM. During my Ph.D. study, I am shifting toward Embodied AI, with a current focus on local manipulation for humanoid robots. I am broadly interested in building robotic systems that can perceive geometry, reason about nearby objects, and act reliably in physical environments.
News
Publications
* denotes equal contribution. † denotes corresponding author.
IROS 2026
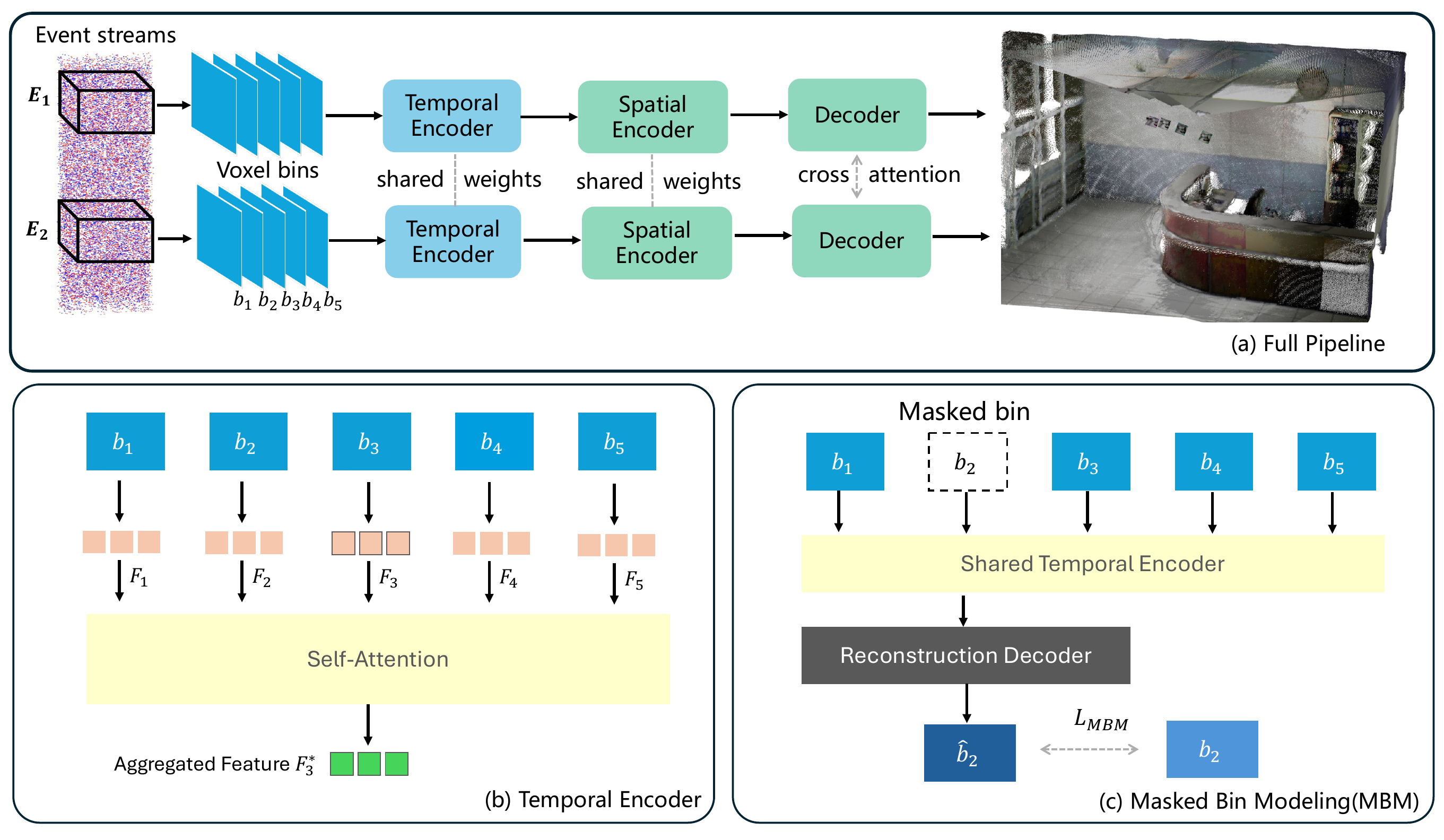
Event3R: Asynchronous-to-Global 3D Reconstruction from Event Camera via Spatial-Temporal Feature Aggregation
Jian Huang*, Haotian Shen*, Xinhao Lou, Chengrui Dong, Wenpu Li, Peidong Liu†
A feed-forward event-camera reconstruction framework that predicts globally aligned 3D point clouds from asynchronous event streams.
ICRA 2026
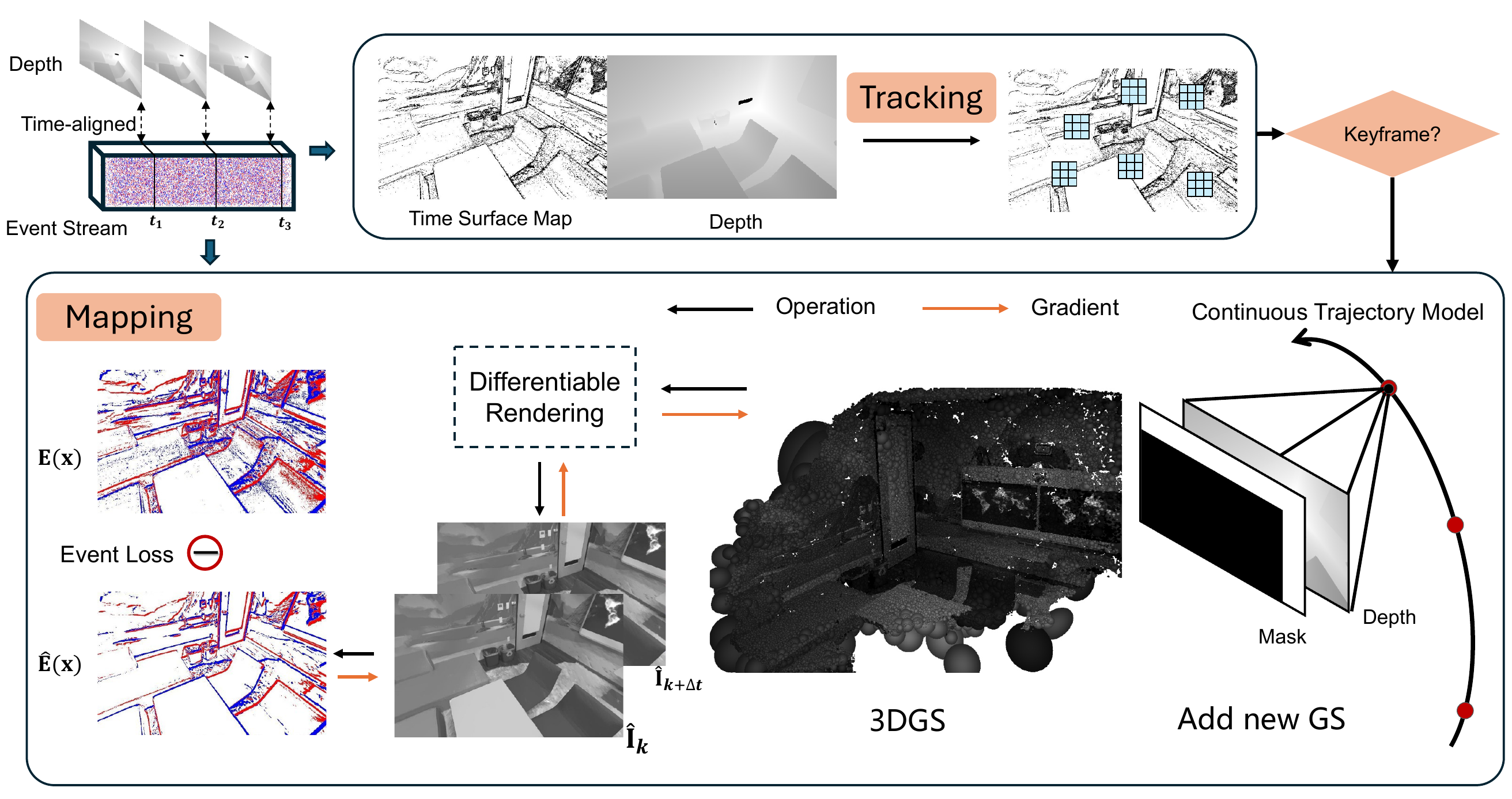
ED-SLAM: Event-Depth Gaussian Splatting SLAM
Jian Huang*, Haotian Shen*, Xinhao Lou, Peidong Liu†
An event-depth Gaussian Splatting SLAM system with robust patch-based tracking for long event streams and high-fidelity reconstruction.
Research Interests
Current Focus
Embodied AI
Humanoid Robotics
Local Manipulation
Robot Learning
Spatial Intelligence
Actionable 3D Perception
Previous Foundation
Event-based Vision
3D Reconstruction
Gaussian Splatting SLAM
Robust Visual Perception
Fast Motion & Low Light
Honors
Dec, 2025
Outstanding Bachelor's Student Award, Westlake University, 2024 academic year.
Oct, 2025
Third-Class Scholarship for Outstanding Undergraduate Students, Westlake University, 2024-2025 academic year.
Dec, 2024
Third-Class Scholarship for Outstanding Undergraduate Students, Westlake University, 2023-2024 academic year.
Dec, 2023
Third-Class Scholarship for Outstanding Undergraduate Students, Westlake University, 2022-2023 academic year.
Nov, 2023
Gold Medal, 2023 iGEM Competition, Westlake-China team.
Education & Experience
2026 - Present
Ph.D. Student, Spatial Intelligence and Robotics Lab, Westlake University.
Sep - Dec 2024
Visiting Student, University of California, Berkeley.
2022 - 2026
B.Eng. in Electronic and Information Engineering, Westlake University.
Email: shenhaotian@westlake.edu.cn
GitHub: Tesla-SHT
Blog
I also use this site to keep academic notes, technical write-ups, and occasional personal records. It is a small place for thinking aloud while I learn.