
EvGGS
Type: Paper
Notebook: Paper (https://www.notion.so/Paper-17de7e7bfd4c80e2bba1f0fe3a6c1131?pvs=21)
Related Notes: Event Camera (https://www.notion.so/Event-Camera-1bde7e7bfd4c80549635dcce48628146?pvs=21)
Paper
Trajectory
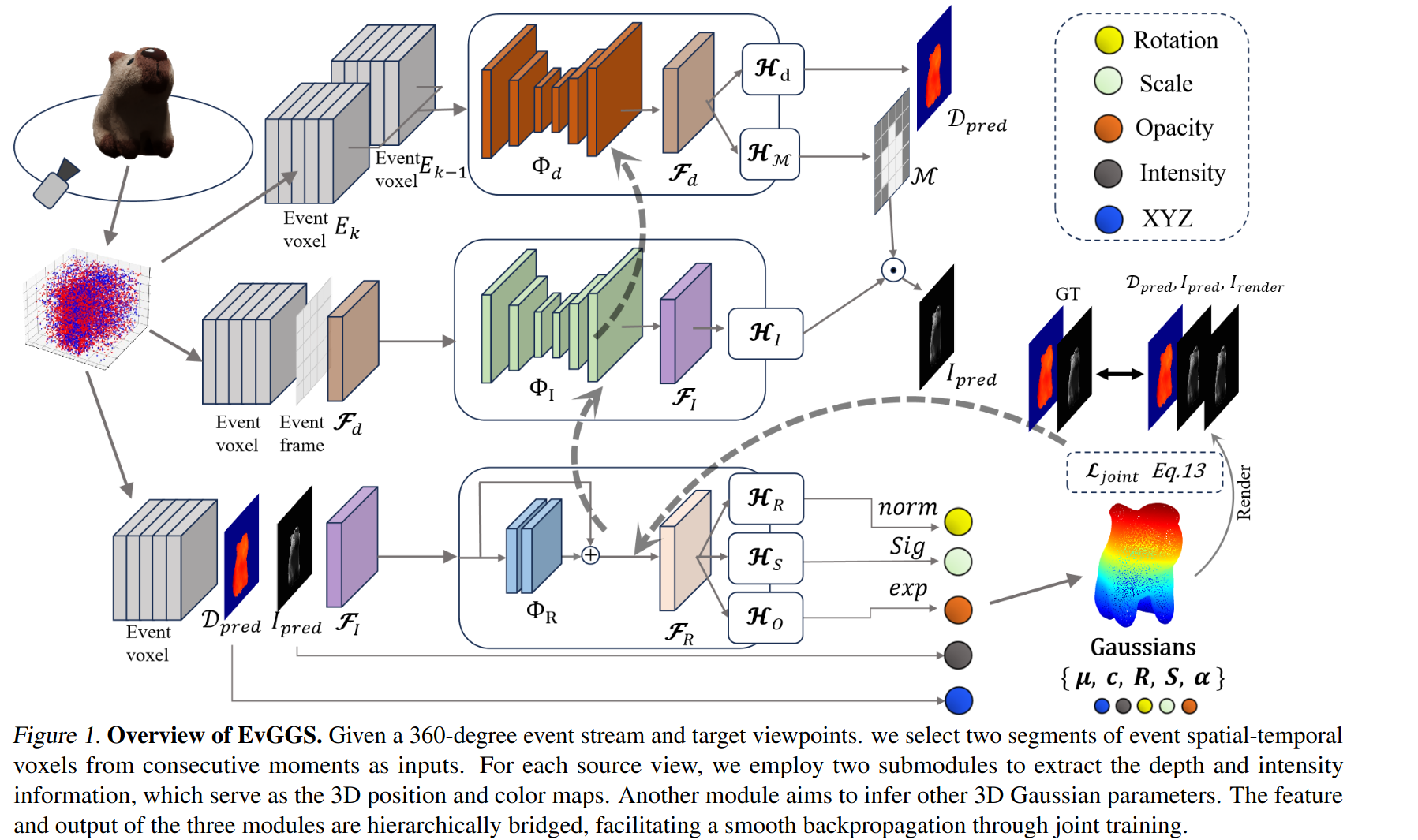
Reconstruct the 3D Gaussians of scenes in a feedforward manner from the given event stream captured by a moving event camera(to collect multiviews).
Input & Output
Input
the asynchronous event stream and encode it into 3D spatial-temporal voxel grid
target view
Output
3D Gaussian representation
Methodology
Monocular Depth Estimation
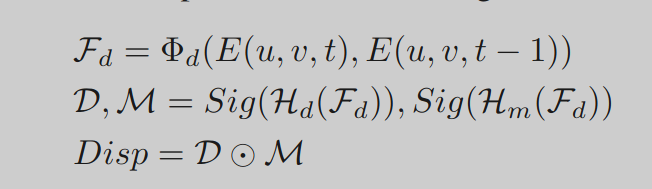
Input the consecutive event voxel grid and
U-net will predict
- disparity map(视差 ): The final depth can be converted form the disparity
- Foreground mask (D): filter out the useless backgrounds
Intensity Reconstruction

Input the event voxel grid, event frame and depth feature volume
Also use UNet to recover the intensity by multiplying the foreground mask, where is the output feture volume
Gaussian Parameter Regression

And the scale, rotation, opacity are calculated
Installation
conda env create --file environment.yml
- delete
diff-gaussian-rasterization==0.0.0 - change to
- simple-knn
if you wanna update the env with yml after modifying, you can use:conda env update --file environment.yml
conda activate evggs
ERROR: CUDA_HOME environment variable is not set. Please set it to your CUDA install root.
conda install -c conda-forge cudatoolkit-dev -y
(can be checked by nvcc —version)
git clone [https://github.com/graphdeco-inria/gaussian-splatting](https://github.com/graphdeco-inria/gaussian-splatting) --recursive cd gaussian-splatting/ pip install -e submodules/diff-gaussian-rasterization cd ..
Data
item = {
'cim': int_img.astype(np.float32)[cs[0]:cs[1], cs[2]:cs[3]][np.newaxis], #[1, H, W]
'lim': left_img.astype(np.float32)[cs[0]:cs[1], cs[2]:cs[3]][np.newaxis],
'rim': right_img.astype(np.float32)[cs[0]:cs[1], cs[2]:cs[3]][np.newaxis],
'leframe': left_event_frame.transpose((2,0,1)).astype(np.float32)[:, cs[0]:cs[1], cs[2]:cs[3]], #[3, H, W]
'reframe': right_event_frame.transpose((2,0,1)).astype(np.float32)[:, cs[0]:cs[1], cs[2]:cs[3]],
'ceframe': center_event_frame.transpose((2,0,1)).astype(np.float32)[:, cs[0]:cs[1], cs[2]:cs[3]],
'lmask': left_mask[cs[0]:cs[1], cs[2]:cs[3]], #[H, W]
'rmask': right_mask[cs[0]:cs[1], cs[2]:cs[3]],
'cmask': center_mask[cs[0]:cs[1], cs[2]:cs[3]],
'lpose': left_pose.astype(np.float32), #[4, 4]
'rpose': right_pose.astype(np.float32),
'intrinsic': intrinsic.astype(np.float32), #[4, 4]
'ldepth': left_depth_gt.astype(np.float32)[cs[0]:cs[1], cs[2]:cs[3]], # #[H, W]
'rdepth': right_depth_gt.astype(np.float32)[cs[0]:cs[1], cs[2]:cs[3]],
'cdepth': center_depth_gt.astype(np.float32)[cs[0]:cs[1], cs[2]:cs[3]],
'center_voxel':center_event_voxel[:, cs[0]:cs[1], cs[2]:cs[3]], #[5, H, W]
'right_voxel':right_event_voxel[:, cs[0]:cs[1], cs[2]:cs[3]],
'left_voxel':left_event_voxel[:, cs[0]:cs[1], cs[2]:cs[3]],
### target view rendering parameters ###
"H":self.cropped_H,
"W":self.cropped_W,
"FovX":focal2fov(intrinsic[0, 0], self.cropped_W),
"FovY":focal2fov(intrinsic[1, 1], self.cropped_H),
'world_view_transform': world_view_transform, #[4, 4]
'full_proj_transform': full_proj_transform, #[4, 4]
'camera_center': camera_center #[3]
}