
Content
ED-SLAM
Type: Paper
Venue: ICRA 2026
Topic: Event-depth SLAM + Gaussian Splatting
Motivation
- 3DGS-SLAM can build dense and high-fidelity maps, but most systems still depend heavily on RGB or RGB-D tracking.
- Conventional RGB tracking is fragile under fast motion, motion blur, low light, or textureless scenes.
- Existing event-based GS methods often assume known poses or become unstable when processing long event streams.
- ED-SLAM tries to make event-depth SLAM more practical: no ground-truth camera poses, robust tracking, and 3DGS-based dense mapping.
Main Idea
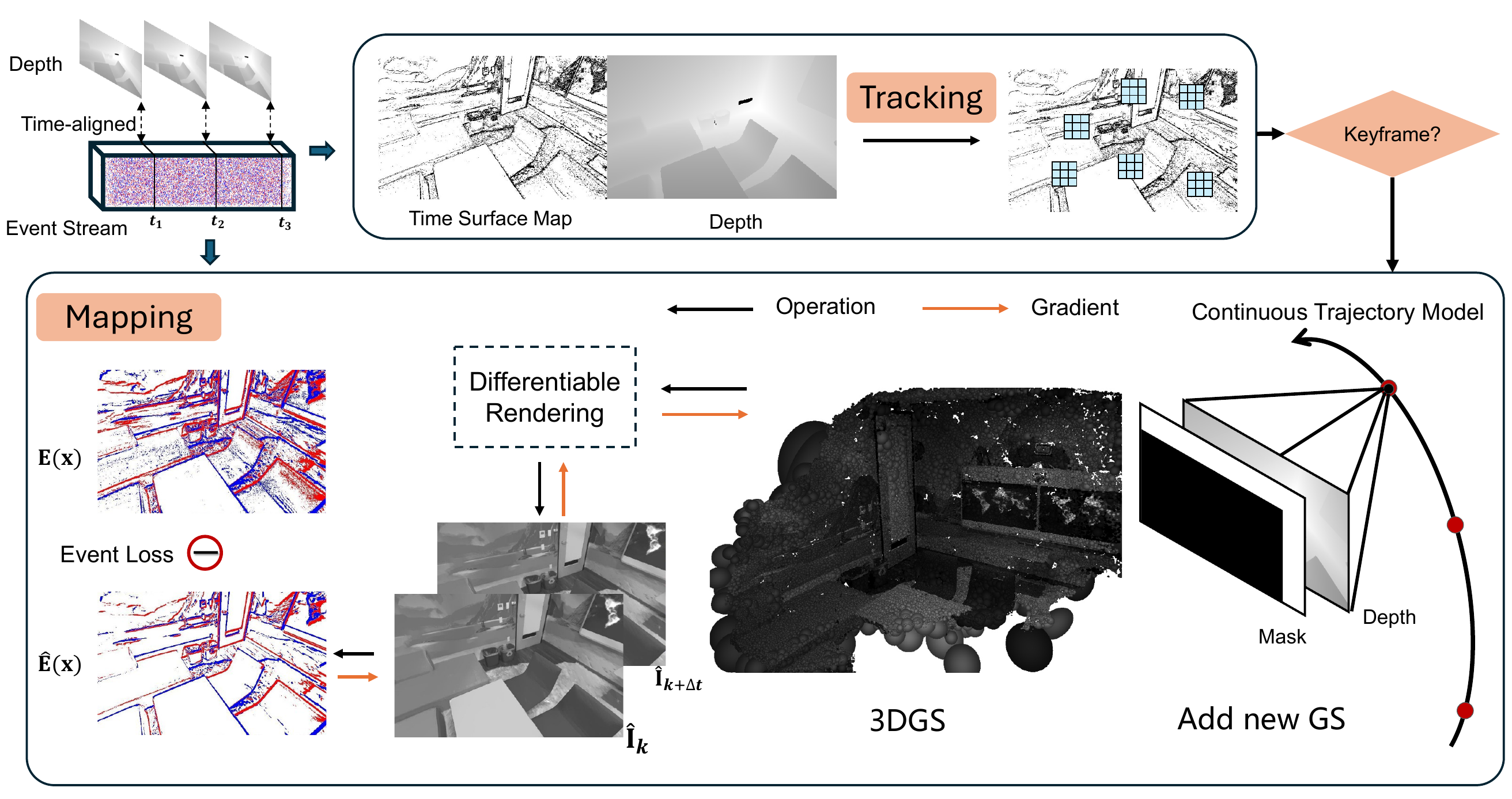
ED-SLAM separates the system into two coupled parts:
- Tracking: convert incoming events into time-surface maps, then estimate pose with depth-aware patch alignment.
- Mapping: use the estimated continuous trajectory and raw event stream to optimize a 3D Gaussian map.
The key design is that events are not only an auxiliary signal. They are used for both robust front-end tracking and fine-grained mapping.
Input & Output
Input
- Time-aligned event stream
- Depth images
- Camera intrinsics
Output
- 6-DoF camera trajectory
- 3D Gaussian scene representation
- Renderable dense reconstruction
Pipeline
Time Surface Map
During tracking, raw events are aggregated into a time-surface map (TSM). Each pixel stores a decayed timestamp of recent events:
The intuition is simple: event cameras naturally fire around image edges, so TSM gives a sharp and low-latency edge-like representation. This is much more stable than RGB images when the camera moves quickly or illumination is poor.
Patch-based Event-Depth Tracking
Instead of aligning the whole image globally, ED-SLAM samples local patches from high-response TSM regions.
For each patch, depth provides the geometry needed for reprojection:
Then the warped patch is sampled on the paired TSM by bilinear interpolation:
The tracking objective is bidirectional: target-to-source and source-to-target are optimized together.
This bidirectional formulation is important because one-way alignment can be biased by occlusion, missing events, or noisy local regions.
Mapping
3D Gaussian Representation
The scene is represented as a set of 3D Gaussians. Each Gaussian stores:
- mean position
- covariance / scale / rotation
- opacity
- color
Rendering follows the standard differentiable 3DGS rasterization pipeline, so both image-like signals and event signals can provide gradients.
Continuous Trajectory Model
Events are asynchronous, so a single pose per frame is too coarse. ED-SLAM interpolates camera poses on the SE(3) manifold:
This allows the system to render brightness changes between close timestamps and compare them with real event measurements.
Event Loss
The rendered event signal is the log-brightness difference between two rendered frames:
The real event signal is accumulated from raw events during the same time interval:
The mapping loss directly compares these two signals:
Why It Works
- TSM converts sparse asynchronous events into a trackable edge representation.
- Depth makes patch warping geometrically meaningful, avoiding pure 2D photometric matching.
- Bidirectional patch alignment improves robustness under partial visibility and noisy events.
- Continuous trajectory modeling matches the temporal nature of events.
- 3DGS provides a compact and differentiable scene representation for dense mapping.
Experiments
The paper evaluates ED-SLAM on both synthetic and real-world event datasets.
The main observed improvements are:
- better tracking stability over long trajectories
- lower pose drift than previous event-based SLAM / GS methods
- higher-quality reconstruction under fast motion and difficult lighting
Takeaways
ED-SLAM is interesting because it does not simply plug events into an RGB-D SLAM system. It builds a dedicated event-depth front end and connects it with 3DGS mapping. For me, the most important part is the patch-based bidirectional tracker: it is small compared with the whole system, but it decides whether the downstream Gaussian map can remain stable.